
偦偟偰丄偣傫抐墳椡冄xz偲冄yz傕倶偲倷幉偺夞揮偵傛傝悢抣傪曄姺偟側偗傟偽側傝傑偣傫丅埲壓偺曽朄偱寁嶼偱偒傑偡丅夞揮偟偨幉偼僾儔僀儉偱昞偟偰偄傑偡
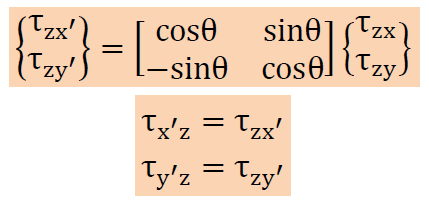
庡墳椡冄x'x'偺曽岦傪帵偡嵗昗幉儀僋僩儖傕曄姺偡傞昁梫偑偁傝傑偡丅忋偺偣傫抐墳椡偲摨條偵埲壓偺傛偆偵側傝傑偡丅
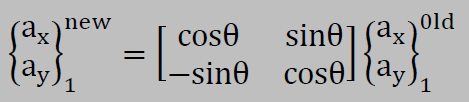
摨條偵懠偺2偮偺嵗昗幉儀僋僩儖傕埲壓偺傛偆偵曄姺偟側偗傟偽側傝傑偣傫丅
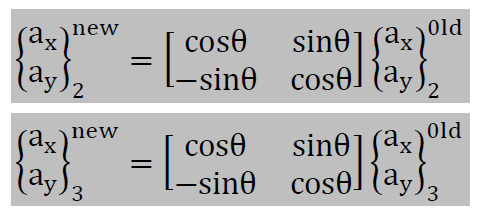
師偺僗僥僢僾偼丄冄x'z偲冄y'z偺愨懳抣偱戝偒偄曽傪忋偱愢柧偟偨曽朄偱寁嶼傪恑傔傑偡丅偙偺偲偒冄x'y'偵嵞傃悢抣偑擖傞偲偄偆偙偲偵拲堄偟偰壓偝偄丅偙偺傛偆偵2師尦偺柺偱偺幉偺夞揮傪拃師揑偵孞傝曉偡墘嶼傪10夞傎偳孞傝曉偡偲恀偺抣偵尷傝側偔嬤偄冄x'x'丄冄 y'y'丄冄 z'z'偑寁嶼偝傟傑偡丅偮傑傝丄冄1丄冄 2丄冄 3偺庡墳椡偑摼傜傟偨偙偲偵側傝傑偡丅摨帪偵丄庡墳椡偺曽岦傪帵偡嵗昗幉偺儀僋僩儖傕摨帪偵寁嶼偝傟傑偡丅
偲偙傠偱忋偱愢柧偟偨曄姺偺曽朄偱偡偑丄暋慺悢傪巊偆偲娙扨偵愢柧偱偒傑偡丅傑偢丄aold=ax+iay偲抲偔偲丄anew= aolde-i兤偱曄姺偱偒傑偡丅嵗昗幉傪兤夞揮偡傞偲偄偆偙偲偼丄儀僋僩儖傪-兤夞揮偟丄xy幉娫偱偦偺儀僋僩儖傪彂偔偙偲偲摨偠偱偡丅暋慺悢偺曄悢偺妡嶼偼夞揮傪昞偟傑偡丅偮傑傝丄z=i偺応崌丄z偼幚幉偐傜90搙夞揮偟偰偄傑偡丅偦偟偰丄zz=ii偼i偵i傪妡嶼偡傞偲偄偆偙偲偼丄峏偵90搙夞揮偝偣傞偲偄偆偙偲側偺偱丄zz偼幚幉偺-1偵側傝傑偡丅偙偺偙偲偐傜丄i2=-1側傝傑偡丅偙傟偼丄暋慺悢偺掕媊偵傛偔巊傢傟傑偡丅
| BACK | NEXT |
|---|
| Menu | LU Decompo | Stiff | 3D Solid | 3D Fluid | Eigen&Lanczos | Sound Eigen | Solid Eigen | Solid Axisym |